Ground-based platform for high-throughput crop phenotyping
2015 - 2017
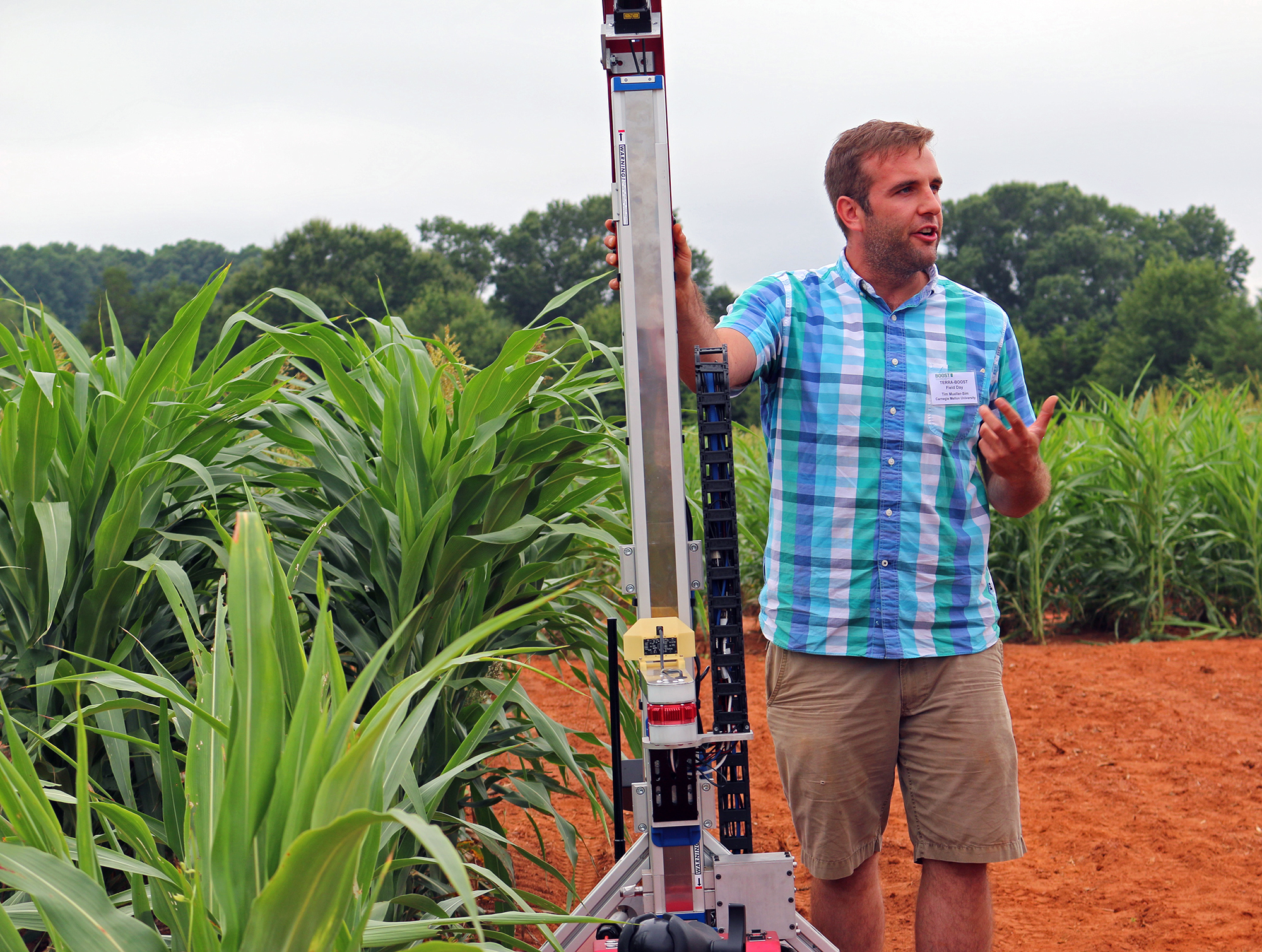
Designed in 2015 and fabricated/deployed in 2016, the Robotanist is an agricultural robot designed to make the process of studying and measuring crops in outdoor fields easier and more efficient. Traditionally, checking the physical traits of plants, like stalk strength or leaf size, is a time-consuming and error-prone task, often done manually by experts. Our robot changes that by autonomously navigating through crop rows, like sorghum or corn, and using various sensors to gather important data about the plants.
The Robotanist can move under the plant canopy, avoiding obstacles and even measuring the strength of plant stalks with a specially designed robotic arm. We tested this robot in real crop fields in South Carolina, where it successfully navigated and collected data in different soil conditions. It's design allows it to work for long hours on a single charge and accurately gather data, which could help researchers speed up the process of breeding better, more resilient crops.
This work represents a significant step forward in using robots for agricultural tasks, showing that they can reliably perform complex tasks in challenging outdoor environments.