







The Robotanist - Systems Paper
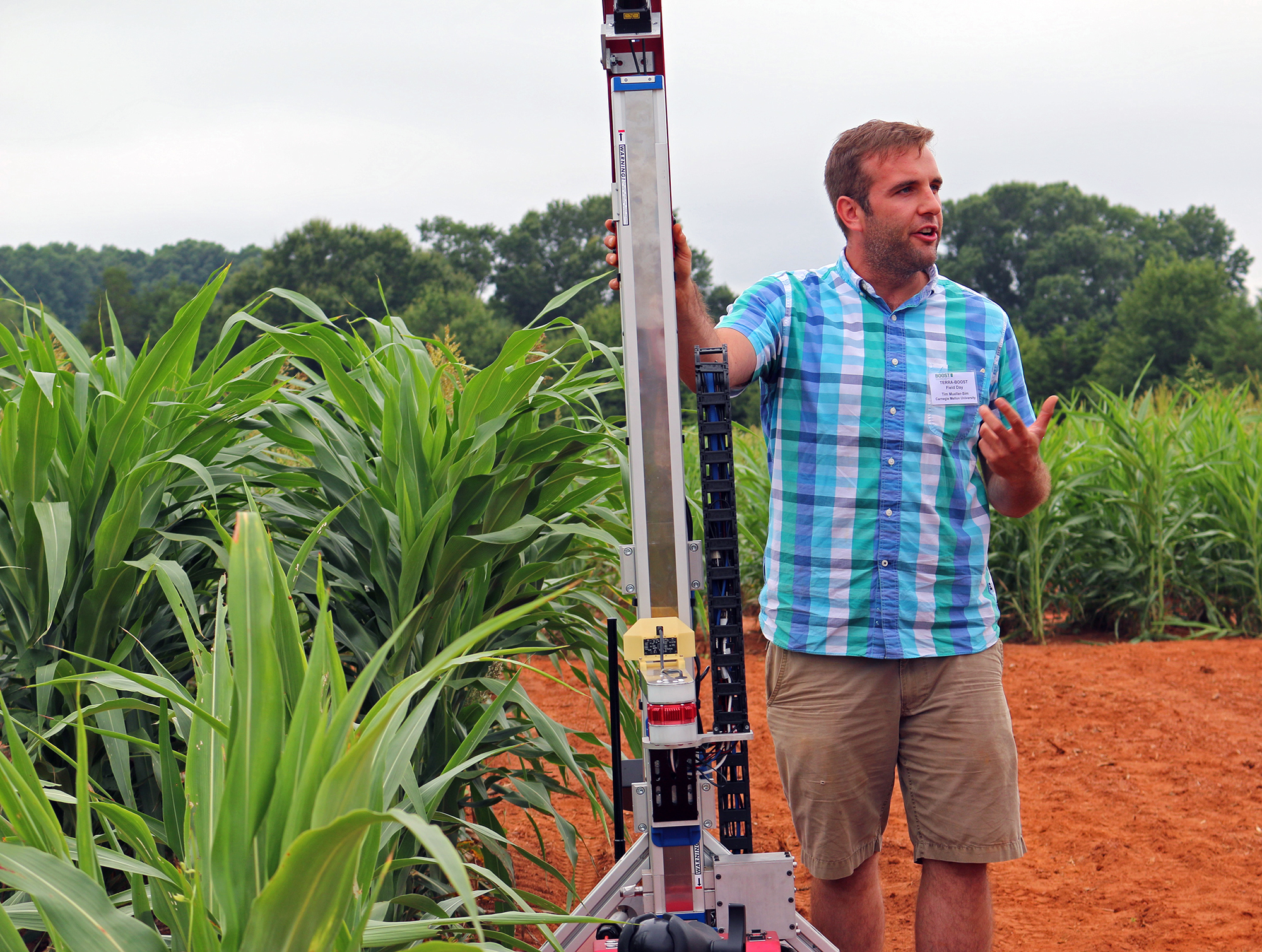
Field testing near Clemson University
The Robotanist
Rendering of the our ground based robotic phenotyping platform, designed to traverse crop breeding plots at a row spacing of 30" for over 8 hours on a single charge. This configuration includes a high resolution stereo imaging sensor with active lighting, used to obtain phenotypes such as stalk diameter, stalk count, leaf angle, as well as resistance to biotic pressure.
ICRA 2017 - The Robotanist
The movie submission to accompany our systems paper outlining the design process, accepted for publication in the Proceedings of 2017 IEEE International Conference on Robotics and Automation. More videos of the robot in action can be found on our YouTube channel
The Robotanist on site in Florence, SC